Le groupe DDS
Introduction
Le but de ce tutoriel est de donner les outils de bases pour démarrer un projet autour d'un DDS, de la programmation à l'implémentation sur circuits imprimés : réalisation de cartes "propriétaires".
Vous pouvez aussi participer à l'enrichissement de cette page avec vos sources ou partager vos projets.
Contacter l'animateur du Groupe DDS par mail Fabrice.wiotte@univ-paris13.fr LPL Université Paris 13
http://jmfriedt.free.fr/network_analyzer.pdf : travaux pratiques de Master1 EEA Besançon pour réaliser un petit analyseur de réseau
à base d'AD9834 (faible consommation, MCK=75 MHz) commandé par STM32F410.
Projets LPL 2020
Générateur DDS pour asservissement Oscillateur YIG 8-18GHz Fichier:GeneYIG.pdf
General Note on the DDS card and on the BUS driver with labview for AOM control Fichier:NoteBusDDS25042014 2.pdf
Phase shifter with DDS AD9959 Fichier:CARTE AD9959 on USB port pour detection synchrone@30MHz.pdf
Quad SPI control for DDS board with ARM TM4C1294 120MHzFichier:DDS board Quad SPI@60MHz.pdf
Projet 2020 : DDS board AD9910 for acousto-optique @250MHz Pilotage avec ARM TM4C123, contrôle numérique de la fréquence au pas de 1MHz et affichage sur LCD. Fichier:AD9910.pdf
Projet 2020 : DDS board AD9959 and FPGA Artix7 développement d'une carte DDS + uC + FPGA pour les projets mixtes du laboratoire. Fichier:Carte mixte FPGA DDS 2020.pdf
Asservissement numérique de température sur cavité laser ultra-stable (projet 2018) Asservissement en température numérique d'une cavité ultra-stable au LPL pour le Strontium condition de stabilité +/- 10mK Résultas obtenus : <1mk sur la journée
Compte tenu des constantes de temps d'intégration nous avons opté pour un lock numérique avec un uC 16 bits. ADC et DAC 12 bits MSP430F169 16bits Texas instruments, and IAR Workbench for MSP430 or Code composer studio Cahier des charges: La précision du lock en température devrait être de l'ordre de 10 mK, pour assurer une stabilité en fréquence du laser de l'ordre de quelques kHz. L'élément chauffant a une résistance de 6 Ohm. Un courant de l'ordre de 0.6 A devrait fournir la puissance pour nous amener au point de fonctionnement vers 27°C. Élément de mesure : thermistor MC65F103B
Ci-joint le code C du projet: gestion affiche LCD + calcul température + fonction standby + contrôle de la consigne de température + lock + timer + déclaration des variables + déclaration prototypes + fichier init système (ADC-DAC TIMER-PORT IN OUT) Fichier:Vh6010-4 inst manual.pdf Fichier:Asservissement en température numérique pour cavité laser ultra-stable.pdf
PID analogique compact pour Peltier diode laser +/-1A: Fichier:PID analogique pour Peltier.pdf
double régulation DC pour four strontium pour des expériences de gaz quantiques dégénérés: alimentation Maitre-esclave 2 x 180W gestion avec uC 16 bits et CPLD pour horloge numérique Fichier:Projet four.pdfFichier:Electronique four Master.pdf
Manipulations d'atomes froids piège magnéto-optique: Interrupteurs IGBTS-MOSFETS pour coupure rapide de bobine 100-400A refroidissement eau Projet complet: Fichier:Driverigbt.pdf
Lock Laser du type Pound Drever Hall avec DDS AD9959: Module complet d'asservissement laser Fichier:Locklaser.pdf
Boucle de régulation pour alimentation bas bruit pour diode laser (0-1A) générateurs de courant constant pour le Sodium et la puce à atomes alimentation pilotée sur liaison USB-série Fichier:Current source.pdf
Carte uC ARM cortex4 TI TIVA TM4C1294 générique pour pilotage multifonction sur port SPI ARM 120MHz, liaison USB-Série, Ethernet (serveur web léger pour uC de TI), encodeur numérique. Fichier:Carte uC tm4c1294.pdf
Générateur de courant bas bruit pilotable numériquement Version 1 uC 16 bits : Pilotage numérique via encodeur pour réglage I local ou à distance via USB et programme Python: ci-joint code de base pour DAC 12 bits ou 16 bits control SPI. Fichier:Dac control.pdf
Version 2 ci-dessous uC 32 bits: Pilotage numérique via encodeur pour réglage I local ou à distance via USB et programme Python ainsi que par liaison Ethernet : DAC 20 bits sur liaison SPI =résolution 1uA sur le courant!



Généralités sur les DDS
Les "Direct Digital Synthesizers" (DDS) sont des synthétiseurs qui peuvent générer des formes d'ondes arbitraires à diverses fréquences à partir d'une fréquence de référence fixe.
Une bonne note expliquant le fonctionnement des DDS se trouve ici : Média:Tuto_dds.pdf

Pourquoi les DDS: Visualisation d'une sortie et programmation
Depuis quelques années pour les équipes de recherches du Laboratoire de Physique des Lasers (LPL), nous utilisons la technologie DDS pour développer des générateurs radiofréquences de quelques MHz à plusieurs centaines de MHz nécessaires au fonctionnement des expériences, ainsi qu'à l'étude et au développement des Condensats d'atomes froids (BEC). Cette technologie au travers de composants spécifiques, nous permet de réaliser des cartes électroniques adaptées aux expériences du laboratoire. Ces dernières sont entièrement pilotable numériquement, on peut ainsi programmer les paramètres principaux tel que la fréquence, la phase et l’amplitude. Les caractéristiques de ces composants font qu’ils disposent d'une grande pureté spectrale, d’une grande stabilité, d’un faible bruit de phase et d’une grande agilité en fréquence sans saut de phase. Les applications: Générateurs de fonctions, oscillateur local, PLL, driver AOM...
- Ci-dessous schéma fonctionnel de l'AD9852.

- 1.1 Description des principales fonctions d'entrées et de sorties.
REFERENCE CLOCK IN si l'horloge externe = 20MHz PLL activée x 15 = 300MHz (fréquence du system clock) ou si PLL off horloge externe max =300MHz. MASTER RESET bit actif sur front logic 1 initialise le DDS et met la sortie RF à zéro. ANALOG OUT est la sortie RF principale 0dBm en général. I/O UPDATE CLOCK est le bit de chargement des données dans le DDS (par défaut généré en interne et synchronisé sur system clock. FSK/BPSK/HOLD bit actif sur front logic 1 lance les rampes de fréquences en autres. OSK bit actif sur front logic 1 lance les rampes d'amplitudes. 8-BIT PARALLEL LOAD bus 8bits pour chargement des données actif si mode parallèle sélectionné. 6-BIT ADDRESS OR SERIAL PROGRAMMING bus 6bits pour chargement des adresses en mode parallèle sinon utiliser seulement bit A0 pour le mode SPI. SERIAL/PARALLEL SELECT bit de sélection des modes de programmation du DDS: = 1 si chargement parallèle, 0 si chargement série(pin 70 du DDS). DIFF/SINGLE SELECT bit de sélection single ended or differential clock input. pin 64 du DDS. WRITE OR WR/SCLK si mode Parallèle => bit de chargement I/O port buffers, actif sur front descendant ou SCLK en mode SPI.
Visualisation d'une sortie d'un DDS (AD9852)
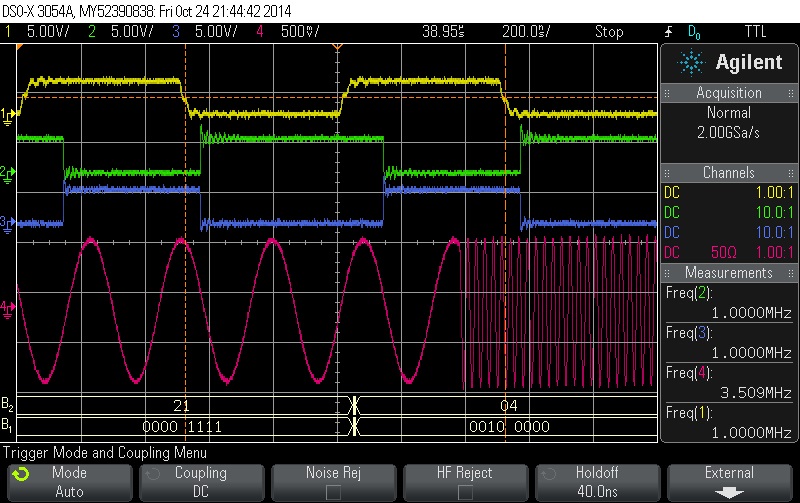

Ci-dessus visualisation du changement de la fréquence de sortie d'un DDS sans saut de phase. Mode de programmation parallèle: en bas de l'écran bus de données(B1) et bus d'adresses(B2). Attention dans cet exemple je ne programme que l'octet de poids fort pour la fréquence et l'amplitude.
En jaune signal d'actualisation des données et adresses, en rouge sortie RF sur 50ohms.
En vert signal WR/SCLK bit de chargement dans I/O port buffers actif sur front descendant et durée minimale programmable = 50ns.
En bleu I/O UPDATE données transmises au DDS actif sur front montant et durée minimale programmable = 50ns.
Les courbes en vert et bleu sont volontairement décalées suivant la procédure de chargement des données fournie dans le datasheet du DDS(page 18 du datasheet AD9852).le mot de fréquence pour ce DDS est codé sur 48 bits et donc 6 Octets avec pour parallel address: 0x04;0x05;0x06;0x07;0x08;0x09 (0x04 Octet de poids fort)ou serial address= 0x02 en mode SPI. le mot d'amplitude pour ce DDS est codé sur 12 bits et donc 2 Octets avec pour parallel address:0x21;0x22; (0x21 Octet de poids fort) ou serial address= 0x07 en mode SPI.
Comment programmer un DDS Une des pages importantes dans un datasheet de DDS est la page register layout table.
celle-ci définie tous les registres à utiliser pour programmer l'ensemble des fonctions de bases.

En rouge le mot de fréquence f1 programmable 48 bits soit sur 6 Octets. En bleu le mot d'amplitude programmable sur 12 bits soit sur 2 Octets. Ce sont les deux paramètres à programmer à minima pour générer un signal RF en sortie.
un DDS utilisé au LPL : l'AD9959

= Une Application concrète au service électronique du LPL = Un MICROCONTROLEUR 16bits MSP430F169 avec un DDS 4 voies l'AD9959

Comment programmer le DDS
La programmation sur ce DDS est uniquement en mode SPI:
Single-bit serial 2-wire mode (default mode)
Single-bit serial 3-wire mode
2-bit serial mode
4-bit serial mode (SYNC_I/O not available)

Côté MSP430F169 : Les sorties SIMO1 P5.1, UCLK1 P5.3 et ACLK P5.6 sont utilisées pour programmer en mode SPI 2 fils (mode par défaut du DDS)
Côté DDS AD9959: SCLK, SDIO_0 et CS/ sont à connecter au microcontrôleur. ci-dessous le mode par défaut.SDIO_1,2 et 3 sont connectés au microcontrôleur pour réaliser si on le souhaite, des profiles de rampes de fréquences ou de phases.
SCLK = serial clock pin 48 du DDS CS/ = Chip select pin 47 du DDS SDIO_0 = Serial data I/O pin 50 du DDS
Quel microcontrôleur?
le DDS est programmé par l'intermédiaire d'un microcontrôleur 16 bits de chez TI,le MSP430F169 @8MHz d'horloge. l'environnement de programmation du MSP430 est IAR Embedded Workbench téléchargeable gratuite dans sa version de base. Je conseil d'acheter le kit de débogage MSP430USB MSP-FET430UIF qui permet un débogage pas à pas pratique. Bien entendu bien d'autres microcontrôleurs (STM32,TIVA séries...) peuvent êtres utilisés à partir du moment que l'on dispose au moins d'un port SPI. Un développement récent avec l'AD9959 à été réalisé avec un microcontrôleur ATMEL ARDUINO DUE,microcontrôleur 32 bits ARM @84MHz. avec chargement SPI 4 fils. Les dernières cartes développées utilisent un microcontrôleur TEXAS TM4C123GH6PM ARM® Cortex®-M4F Based MCU TM4C123G et TM4C1294@120MHz.
Les différents registres du DDS l'AD9959 table 28 du datasheet de l'AD9959
registre CSR (channel select register) One byte is assigned to this register: le nombre d'octets du registre ici 1 octet. CSR serial address = 0x00; CSR defaut value = 0xF0;
Ce registre active les voies de sorties et les modes SPI: Par défaut toutes les voies sont activées et le mode SPI Single-bit serial 2-wire est sélectionné. Il est évidemment possible de redéfinir ce registre suivant son application.
Le second registre est le registre FR1: table 28 du datasheet registre FR1 (fonction register 1) three bytes is assigned to this register: nombre d'octets du registre FR1 serial address = 0x01; FR1 defaut value = 0x00;
Ce registre permet en autres de définir la PLL interne et le coefficient multiplicateur x4 à x20. Pour exemple la valeur à fournir pour activer la PLL x20 ⇒ FR1 = 0xD00000; Dans ce cas il suffit de fournir un quartz à 25MHz avec la PLL activée x20 on a 500MHz d'horloge PIN 22 et 23 du DDS.
Le troisième registre est le registre CFR table 29 du datasheet registre CFR (Channel Function Register) three bytes is assigned to this register: nombre d'octets du registre CFR serial address = 0x03; CFR defaut value =0x302;
Ce registre défini les différents mode de fonctionnement du DDS.Ce registre est important si vous utiliser certains modes de fonctionnement: balayage de fréquence, de phase, ou d'amplitude. Important par défaut les sortie sont en mode DAC full-scale current.
Le quatrième registre est le registre CFTW0: table 29 du datasheet registre CFTW0 (Channel Frequency Tuning Word 01) four bytes is assigned to this register: nombre d'octets du registre CFTW0 serial address = 0x04; CFTW0 defaut value =0x00;
Ce registre permet de rentrer la fréquence désirée suivant la relation ci-dessous:
FTW0 = frequency output x 2^32 /frequency clock en Hexadecimal
Le cinquième registre est le registre CPOW0 table 29 du datasheet registre CPOW0 (Channel Phase Offset Word 01) two bytes is assigned to this register: nombre d'octets du registre CPOW0 serial address = 0x05; CPOW0 defaut value =0x00;
Ce registre définie la phase du signal de sortie codé sur 14 bits avec la relation ci-dessous:
CPOW0 = Delta phi x 2^14 /360°
Le sixième registre est le registre ACR: table 29 du datasheet registre ACR (Amplitude Control Register) two bytes is assigned to this register: nombre d'octets du registre ACR serial address = 0x06; ACR defaut value =0x00;
Ce registre permet de définir l'amplitude. Par défaut l'amplitude est en mode full scale mais programmable si on modifie le registre CFR.
Les autres registres sont utiles pour programmer le DDS pour des balayages de fréquences, de phases et d'amplitudes en autres.
Registre FR2 (Function Register 2) Registre LSRR (Linear Sweep Ramp Rate1) Registre FDW (LSR Falling delta Word1) Registre RDW (LSR Risingdelta Word1) Registre CW1 (Channel Word 1) ...
Programme en C écrit dans un microcontrôleur, le MSP430F169
initialisation et chargement des registres CSR et CFTW0:
int CSR_ADDRESS = 0x00; AD9959 CSR adresss Byte
int CSR_NUM_BYTE = 0x01; CSR nombre d'octet du registre
long CSR0 = 0x10; AD9959 du channel 0 MSB first SPI par défaut
int FTW_ADDRESS = 0x04; AD9959 FTW adresss Byte
int FTW_NUM_BYTE = 0x04; FTW nombre d'octet du registre
long FTW0 = 0x28F5C28F; frequence en hex = fout x2^32/fclock
dans le main
P4OUT = 0x40; AD9959 master reset bit de validation du MSP430
P4OUT = 0x00; AD9959 master set bit de validation du MSP430
write_serial_port(CSR_ADDRESS, CSR0, CSR_NUM_BYTE);
P5OUT = 0x40; I/O update du DDS bit de validation du MSP430
P5OUT = 0x00; I/O update du DDS bit de validation du MSP430
write_serial_port(FTW_ADDRESS, FTW0, FTW_NUM_BYTE);
P5OUT = 0x40; I/O update du DDS bit de validation du MSP430
P5OUT = 0x00; I/O update du DDS bit de validation du MSP430
Commentaires sur le programme:
on fait un RESET du DDS (pin 3), on charge les données de chaque registre au travers du port SPI write_serial_port… Puis on réalise un I/O UPDATE pin 46 du DDS pour la validation et le transfert des données. Ce bout de programme permet de charger le channel 0 avec une fréquence de 80MHz et une amplitude par défaut FULL DAC.
I/O_UPDATE is synchronous to the SYNC_CLK (Pin 54) = Master clock/4. Voir figure 40 du datasheet du DDS.
Ci-dessous le sous programme d'initialisation des ports du microcontrôleur et du SPI pour le MSP430F169 : TI fourni de nombreux exemples de codes de bases pour configurer les modes SPI, I2C et utiliser la mémoire Flash: slac015p.zip
#include <msp430x16x.h>
void DDS_quartz_oscillator_init(void)
{
BCSCTL1 |= XTS; ACLK= LFXT1= HF XTAL
BCSCTL2 |= SELM_3; MCLK = LFXT1 (safe) pin 8,9 du MSP430
P1SEL = 0x00; P1 I/O select
P2SEL = 0x00; P2 I/O select
P3SEL = 0x00; P3 I/O select
P4SEL = 0x00; P4 I/O select
P5SEL = 0x0A; P5.1,3 SPI option select
P6SEL = 0x00; P6 I/O select
P1DIR = 0xFF; P1.output direction
P2DIR = 0xFF; P2 output direction
P3DIR = 0xFF; P3 output direction
P4DIR = 0xFF; P4 output direction
P5DIR = 0xFF; P5 output direction
P6DIR = 0xFF; P6 output direction
ME2 |= USPIE1; Enable USART1 SPI
UCTL1 |= CHAR + SYNC + MM; 8-bit SPI Master **SWRST**
UTCTL1 = CKPH + SSEL1 + STC; SMCLK delayed, 3-pin
UBR01 = 0x2; ACLK/2 for baud rate
UBR11 = 0x0; ACLK/2 for baud rate
UMCTL1 = 0x0; Clear modulation
UCTL1 &= ~SWRST; Initialize USART state machine
}
BCSCTL1 |= XTS; et BCSCTL2 |= SELM_3; permet d'être en mode HF XTAL le MSP430 fonctionnera à 8MHZ au lieu de 32KHz par défaut.
MSP430F169
-----------------
/|\| XIN|-
| | | HF XTAL (455k - 8Mhz)
--|RST XOUT|-
| |
| P5.4|-->MCLK = XTAL
D'après : M. Buccini Texas Instruments Inc. Feb 2005 Built with CCE Version: 3.2.0 and IAR Embedded Workbench Version: 3.21A
le sous programme pour le chargement des données en mode SPI du MSP430F169
void write_serial_port(int instruction, long data, int num_byte)
{
int i=0;
TXBUF1 = instruction;
do
{
TXBUF1 = data >>(num_byte-1-i)*8;
i++;
}
while (i < num_byte);
}
Un code complet pour charger le DDS avec le MSP430F169
#include <msp430x16x.h>
#include "DDS_quartz_oscillator.h"
void init_sys(void); MSP430 Initialisation routine
void tempo_loop(int loop_number); wait loop
void write_serial_port1(int instruction, long data, int num_byte);
/ main() variable declarations /
/ configuration Channel Select Register /
Channel Select Register
int CSR_ADRESS = 0x00; AD9959 CSR adresss Byte
long CSR = 0x10; AD9959 CH0 only MSB first
int CSR_NUM_BYTE = 0x01; AD9959 byte number by CSR
int FTW0_ADRESS = 0x04; AD9959 FTW0 adresss Byte
long FTW0 = 0x38C9138C; AD9959 Frequency Tuning Word0 122MHz
int FTW_NUM_BYTE = 0x04; AD9959 byte number by FTW
void main(void)
{
/ initialisation du msp430 /
init_sys(); Initialise the MSP430
tempo_loop(10000); wait loop
P5OUT = 0x00;
P4OUT = 0x40; Reset AD9959
tempo_loop(10000); wait loop
P4OUT = 0x00; Set AD9959
write_serial_port1(CSR_ADRESS, CSR, CSR_NUM_BYTE);
tempo_loop(100); wait loop
P5OUT = 0x40; AD9959 I/O update
P5OUT = 0x00;
write_serial_port1(FTW0_ADRESS, FTW0, FTW_NUM_BYTE);
tempo_loop(10); wait loop
P5OUT = 0x40; AD9959 I/O update
P5OUT = 0x00;
}
void init_sys(void)
{
WDTCTL = WDTPW + WDTHOLD; // stop Watch Dog Timer
DDS_quartz_oscillator_init(); // init usart1, spi mode, 2wire
}
void write_serial_port1(int instruction, long data, int num_byte)
{
int i=0;
TXBUF1 = instruction;
do
{
TXBUF1 = data >>(num_byte-1-i)*8;
i++;
}while (i < num_byte);
}
void tempo_loop(int loop_number)
{
int i;
int j;
for(i = 0; i < loop_number; ++i) wait loop
{
j=j+i;
}
}
ne pas oublier le fichier DDS_quartz_oscillator.h dans le projet pour compiler le programme.
Un kit de prototypage ARM TI & MSP430 TI


IAR for MSP430: code size limited (8Ko) ou code composer studio for MSP430
Programme principal sous IAR for MPS430 et fichier Init MSP430F169


DDS Card AD9858 on ARM uC TM4C123GH6PM with USB-serial interface@1MHz Baud Rate

Pour remplacer des cartes d'évaluations Analog device avec un programme souvent non versatile on a développé une source RF entièrement pilotable numériquement grâce à une interface USB-Série et un programme pour microsoft PC C-sharp (dérivé du C++ et très proche du Java,utilisé notamment pour développer des applications web sur la plateforme ASP.NET.). La partie hardware se compose d'un DDS AD9858 @1GHz Clock et d'un uC TEXAS INSTRUMENT TM4C123 @80MHz d'horloge. Un firmware en C à été développé pour le uC qui pilote directement le DDS en mode SPI 3fils @10MHz. L'environnement de programmation est le même que pour le uC développé plus haut, c'est à dire sous IAR Embedded pour ARM. Le programme envoi donc le mot de fréquence (4 Octets) en mode continu ou en single mode, pour réaliser des balayages de fréquences dont la résolution est définie par le nombre de points et le pas entre deux fréquences envoyées par le programme sous C-sharp.

code C firmware pour SPI sur uC TM4C123GH6PM
void ssi0PutData( int instruction,long data,int num_byte)
{
int i=0;
SSI0_DR_R = instruction;
while( num_byte )
{
while(!(SSI0_SR_R & SSI_SR_TNF)) {} // wait until there is space to write in the buffer
SSI0_DR_R = data >>(num_byte-1-i)*8;
num_byte--;
}
while( !( SSI0_SR_R & SSI_SR_TNF ) )
{
;
}
}
void init_SPI0(void)
{
// Enable Peripheral SSI0
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA); //Enable GPIO port A pins which are used for SSI0.
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI0);
GPIOPinConfigure(GPIO_PA2_SSI0CLK);
//GPIOPinConfigure(GPIO_PA3_SSI0FSS);
GPIOPinConfigure(GPIO_PA5_SSI0TX);
//GPIOPinTypeSSI(GPIO_PORTA_BASE, GPIO_PIN_5 | GPIO_PIN_3 | GPIO_PIN_2);
GPIOPinTypeSSI(GPIO_PORTA_BASE, GPIO_PIN_5 | GPIO_PIN_2);
SSIConfigSetExpClk(SSI0_BASE, SysCtlClockGet(), SSI_FRF_MOTO_MODE_0, SSI_MODE_MASTER, 10000000, 8);
SSIEnable(SSI0_BASE); // Enable the SSI
}

code C pour initialiser le port série
void init_UART0(void)
{
// Enable Peripheral UART0
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
GPIOPinConfigure(GPIO_PA0_U0RX);
GPIOPinConfigure(GPIO_PA1_U0TX);
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
UARTConfigSetExpClk(UART0_BASE, SysCtlClockGet(), 1000000,
(UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE | UART_CONFIG_PAR_NONE));
}
Routine pour les données reçus et transmises
void UART0_send(void)
{
temp[t++] = UART_InChar(); //Read from buffer
if(t >3)
{ write_immediate();
for(t=0;t<4;t++)
{
UART_OutChar(temp[i++]);
}
t = 0; //Reset read length
i = 0;
}
}
DDS Card AD9852 and AD9858 sur NI Card DIO 32
Description du projet
Pour une nouvelle expérience du laboratoire, nous avons développé de nouvelles cartes électroniques qui utilisent des composants DDS contrôlés par un ordinateur sur un bus de données numériques. La carte numérique qui contrôle le bus est la carte DIO 32 HS de National Instrument. Ces sources RF programmables à base de technologie DDS seront mises en œuvre sur la nouvelle expérience des atomes froids de l’équipe Gaz Quantique Dipolaire pour conduire les AOM de l'expérience. Pour contrôler les cartes, un programme simple sous LABVIEW a été développé. La principale motivation de ce projet était de construire un système de contrôle pour l'expérience qui permet d'intégrer de nombreuses fonctions avec une interface utilisateur. Les cartes DDS permettront de contrôler avec une bonne synchronisation les différents AOM.
Le bus de données :
Le bus est un bus parallèle de 25 lignes qui est transféré avec un câble plat de 50 lignes, de sorte que les lignes de masses et les lignes de signaux sont alternées. La vitesse du bus dépend des caractéristiques des cartes NI fournies soit de l’ordre de 1/10MHz soit 100ns. Les 16 premières lignes du bus sont les lignes des données et les huit dernières lignes correspondent aux adresses d’appareils (255 en théorie mais 6 bits en pratique et donc 64 appareils adressables). Enfin, la dernière ligne (ligne 25) est l'horloge (STROBE) qui contrôle le débit de données qui est transmis sur le bus. Ce signal met à jour les données et les adresses sur le bus. Ce signal d'horloge doit être présent sur le bus.
Programmation des DDS :
Les huit premières lignes de données transmises au DDS sont les DATA : D0-D7 Les huit secondes lignes transmises au DDS sont les ADRESSES : A0-A5 et A6-A7 pour les modes FSK et OSK de l’AD9852 et PS0 PS1 pour l’AD9858. Les huit dernières lignes permettent le décodage d’adresses : decodeA2-decodeA7 Décode au maximum 64 cartes. Les lignes decodeA0 et decodeA1, sont utilisées pour initialisées le DDS de tel sorte que :
A1 A0 = 00 : Master reset DDS
A1 A0 = 01 : Load data DDS
A1 A0 = 10 : I/O update DDS non utilisé si I/O Update interne.
A1 A0 = 11 : non utilisé

Pour initialiser les cartes DDS et transférer les données aux DDS via le bus nous utilisons des composants programmables du type CPLD (circuit logique programmable) associés à des translateurs de niveaux pour passer du niveau TTL (5v) au niveau LVCMOS (3.3v).
Le composant utilisé est un CPLD de la famille XILINX XC2C64A 64 cellules.
Ce composant initialise la carte DDS, assure le décodage d’adresses d’appareils, et surtout la synchronisation des pins du DDS (MASTER RESET, LOAD DATA et I/O UPDATE).
Les cartes DDS disposes de deux CPLD le premier en bas (CPLD1) de la carte pour la synchronisation et l’initialisation du DDS, le deuxième (CPLD2) recopie les données en entrée du bus après autorisation du CPLD1.
La programmation des CPLD se fait grâce à l’environnement ISE design suite 14 ou ultérieur téléchargeable gratuitement sur le site de XILINX (ISE WEB PACK) ;
Ci-joint dans ce document les codes sources pour charger les deux CPLD. Un câble JTAG-USB est indispensable pour la programmation.


BUS en fond de panier 25 lignes dont la fréquence de rafraîchissement est d'environ 10MHz et limité par la carte DIO 32 ancienne génération. Chaque carte a une adresse propre (64 max). Le SWITCH DIP 8 sur la carte défini celle-ci.Le code VHDL pour les deux CPLD est simple et modifiable si nécessaire. VHDL pour CPLD1 carte DDS AD9852 et bus NI Fichier:VHDL.pdf
Nous avons utilisé une carte FPGA indépendante pour tester les cartes DDS sans le bus numérique : kit utilisé spartan 6 CMODS6. avril 2019

library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
-- programme pour tester le bus parallèle et les cartes DDS AD9852--
entity XILINX_DDS_AD9852 is
Port (
MASTER_CLOCK : in STD_LOGIC;
reset : in STD_LOGIC;
dout : out std_logic_vector(7 downto 0);
d_address : out std_logic_vector(7 downto 0);
BP0 : in STD_LOGIC;
DECODE_A0_A1_IN : in STD_LOGIC_VECTOR (1 downto 0);
ADDRESS_BUS_CARD_in : in STD_LOGIC_VECTOR (5 downto 0);
ADDRESS_BUS_CARD : out STD_LOGIC_VECTOR (5 downto 0);
DECODE_A0_A1_OUT : out STD_LOGIC_VECTOR (1 downto 0);
OUTPUT_GND : out STD_LOGIC_VECTOR (15 downto 0)
);
end XILINX_DDS_AD9852;
architecture Behavioral of XILINX_DDS_AD9852 is
TYPE mem_data IS ARRAY (0 TO 7) OF std_logic_vector(7 DOWNTO 0);
--déclaration de zone mémoire pour les datas--
TYPE mem_address IS ARRAY (0 TO 7) OF std_logic_vector(7 DOWNTO 0);
--déclaration de zone mémoire pour les adresses--
SIGNAL count_1MHz : integer := 255; --déclaration d'un compteur 8 bits--
SIGNAL clock_1MHz_int : STD_LOGIC :='0'; -- signal issus du diviseur d'horloge--
SIGNAL compte : STD_LOGIC_VECTOR (3 DOWNTO 0):="0000";
constant data : mem_data := (
("01001111"), --data PLL x 15 clk = 20MHz x15= 300MHz
("00001111"), --data amplitude;
("00001000"), --Fout = 10MHz AD9852
("10001000"), --Fout = 10MHz AD9852
("10001000"), --Fout = 10MHz AD9852
("10001000"), --Fout = 10MHz AD9852
("10001000"), --Fout = 10MHz AD9852
("10001000")); --Fout = 10MHz AD9852
constant address : mem_address := (
("00011110"), -- adresse HEX=0x1E; AD9852 parallel address
("00100001"), -- adresse HEX=0x21; AD9852 parallel address
("00001001"), -- adresse HEX=0x09; AD9852 parallel address
("00001000"), -- adresse HEX=0x08; AD9852 parallel address
("00001101"), -- adresse HEX=0x07; AD9852 parallel address
("00000110"), -- adresse HEX=0x06; AD9852 parallel address
("00000101"), -- adresse HEX=0x05; AD9852 parallel address
("00000100")); -- adresse HEX=0x04; AD9852 parallel address
begin
-- GND ----------
OUTPUT_GND <= (others => '0');
ADDRESS_BUS_CARD <= ADDRESS_BUS_CARD_in; --adresse de décodage des DDS--
DECODE_A0_A1_OUT <= DECODE_A0_A1_IN; -- initialisation des données à transmettre A0 A1--
--STROBE_out <= clock_1MHz_int;
--Diviseur par 50 50MHz/50 = 1MHz
PROCESS
BEGIN
wait until MASTER_CLOCK'EVENT and MASTER_CLOCK = '1';
IF count_1MHz < 50 THEN
count_1MHz <= count_1MHz + 1;
ELSE
count_1MHz <= 0;
END IF;
IF count_1MHz < 25 THEN
clock_1MHz_int <='0';
ELSE
clock_1MHz_int <='1' ;
end if;
end process;
--compteur et envoi des datas sure le bus parallèle--
process(clock_1MHz_int,reset)
begin
if reset ='1' then
compte <= "0000";
dout <="00000000";
d_address <="00000000";
elsif clock_1MHz_int'event and clock_1MHz_int='1' then
IF compte < 8 and BP0 ='1' THEN
dout <= data(CONV_INTEGER(compte));
d_address <= address(CONV_INTEGER(compte));
end if;
IF compte > 7 THEN
compte <= "0000";
ELSE
compte <=compte + 1;
END IF;
end if;
end process;
end Behavioral;
Projet STRONTIUM antenne RF 375-400MHz
Projet Antenne RF: RF CARD 375 to 400MHz Frequency Sweep control for RF antenna. Le but est de générer des sweeps de fréquence arbitraire pour une antenne RF dans la gamme de fréquence 375 à 400 MHz avec des pas de qqs KHz. J'utilise deux DDS , l'AD9911 pour asservir un VCO ultra low noise à 1GHZ (ROS-1000-519+) minicircuits et le second l'AD9858 pour générer les fréquences arbitraires. Ce dernier est “clocké” grâce au 1GHz provenant du VCO sur la carte. J'utilise également le MSP430F169 pour piloter les deux DDS en mode SPI 2wire single bit (bus SPI commun, un master et deux slaves en utilisant le chip select (CS) de chaques DDS).

Caractéristiques Programmation en mode SPI maître-esclave 2-wire mode single-bit. L’AD9911 et l’AD9858 en mode esclaves via les Chip Select (CS). Horloge commune le ROS-1000C-519@1GHz. Pente de la rampe de fréquence programmée via l’interface CVI. TTL externe commande rampe up et rampe down. Nécessite un signal d’horloge externe 10MHz 5dBm. Une sortie RF (AD9858) programmable 0-400MHz 0dBm.
Projet diffusion Raman expérience CHROME
Conception et réalisation d'un ensemble de deux pilotes acous-optiques d'une puissance unitaire de 2W. L'objectif est de régler le décalage en fréquence de deux faisceaux "Raman" corrélés en phase. Réalisation de deux sources RF@80MHz en corrélation de phase avec une fréquence centrale de 80MHz. Pilotage sur liaison USB-Série@10MHz (en cours de tests). Les signaux RF sont synchronisés sur une même horloge@500MHz à l'aide d'un DDS AD9959 qui dispose de plusieurs sorties RF basse puissance (5dBm).Les circuits sont implémentés sur des cartes au format Europe et insérées dans un châssis 19 pouces entièrement réalisé à l'atelier d'électronique.

DDS pour détection synchrone et asservissement PDH
Système de lock laser sur cavité ultra stable voir synoptique ci-dessous:

DDS card for PDH AD9959 on uC TM4C123 and LCD 2x16 and codeur Gray


Même si l'encodeur est utilisé dans un programme en c je fourni pour les amateurs de VHDL le programme pour l'encodeur numérique.VHD Fichier:Encodeur.pdf


Programme ARM for PDH Fichier:Programme uC TM4C123GH6PM for PDH module.pdf
Carte partie Lock

Carte partie DDS

Double DDS AD9959 sur port SPI quad @60MHz Projet 2019 avec interface graphique Python
Développement 2019 : Piège RF Pour des considérations de vitesse d’exécution et de chargement des données nous avons fait évoluer les cartes DDS pour l'expérience BEC du LPL. La programmation des DDS est réalisé en Quad SPI à une vitesse de 60MHz. les données sont transmises au uC (ARM 120MHz) grâce à l'interface USB-UART non représentée sur le PCB ci-dessous à une vitesse de 10Mbps.
8 sorties RF programmables révision 1 2018: Code C pour les routines principales: Fichier:Code c routine principales.pdf

Mesures double DDS 2019 Ci-joint une copie d'écran du taux de transfert en mode 4 fils SPI qui montre la vitesse max des datas sur le port SPI. CLK SPI 60MHz. Test avec des liaisons SPI courtes sur une carte DDS AD9959 voie 0 et 1 activées. En rouge : I/O Update En jaune : CLK data SPI 2 coups d'horloge / Octet transmis. En bleu et vert : chanel 0 et chanel 1.

Sous Altium 2019 4 couches et plan de masse interne 35um Alimentation +5v, consommation 0.6A double DDS 2019.


Programme Python pour la liaison USB-Série : Pour charger les fréquences et les amplitudes des sorties RF j'ai utilisé Pyserial et Python 3.7
Ci-dessous le code Python éditer avec l'IDE Thonny ( pour les débutants comme moi c'est pas mal ;) !)
il suffit d'installer Python 3.7 puis d'importer la bibliothèque PySerial.
IMPORTANT : le code c pour transmettre et recevoir les données via l'UART ci-dessous un exemple:
void write_immediate() //AD9959
{
//frequency DDS0//
frequency_value_f1_DDS0 = temp[3]<<24|temp[2]<<16|temp[1]<<8|temp[0];
FTW0_DDS0 = frequency_value_f1_DDS0 * 4294967296 / 500000000; //Convert to command for DDS //ad9959
frequency_value_f2_DDS0 = temp[7]<<24|temp[6]<<16|temp[5]<<8|temp[4];
FTW1_DDS0 = frequency_value_f2_DDS0 * 4294967296 / 500000000; //Convert to command for DDS //ad9959
frequency_value_f3_DDS0 = temp[11]<<24|temp[10]<<16|temp[9]<<8|temp[8];
FTW2_DDS0 = frequency_value_f3_DDS0 * 4294967296 / 500000000; //Convert to command for DDS //ad9959
frequency_value_f4_DDS0 = temp[15]<<24|temp[14]<<16|temp[13]<<8|temp[12];
FTW3_DDS0 = frequency_value_f4_DDS0 * 4294967296 / 500000000; //Convert to command for DDS //ad9959
....
}
//*****************************************************************************
//
// The UART interrupt handler.
//
//*****************************************************************************
void UARTIntHandler(void)
{
uint32_t ui32Status;
ui32Status = UARTIntStatus(UART0_BASE, true);
UARTIntClear(UART0_BASE, ui32Status);
while(UARTCharsAvail(UART0_BASE)) //loop while there are chars
{
//send data to uC via USB/Uart for change one output frequency ( 4 octets)
temp[t++] = UART0_DR_R; //Read from buffer
if(t >...)
{
write_immediate();
t = 0; //Reset read length
}
}
}
Code Python: Fichier:Code python.pdf Code Python avec l'interface graphique Fichier:Code python avec l'interface numérique.pdf

DDS AD9852 sur port SPI 10MHz Projet 2019 avec interface graphique pour modulation FSK AOM@80MHz
Objectif: remplacer un pilote acousto-optique analogique et un générateur de fonction arbitraire par une DDS programmable et modulé en fréquence (FSK) l'AOM autour d'une raie centrale@80MHz. - modulation continue interne. - une fréquence de modulation autour de 100 kHz, réglable ; actuellement on utilise 110 kHz, une amplitude de modulation allant jusqu'à 500 kHz, réglable.
-

dds board
-

soft la dernière version est sous python 3.7


Ci-joint code c pour le µC arm TM4C123: Fichier:Code ARM modulation FSK.pdf